Minimal Mobile Systems via Cloud-based Adaptive Task Processing
The high cost of robots today has hindered their widespread use. Specifically, a limiting factor involves extensive hardware and software computational resources required to run various real-time robot functions, from intensive inference with large neural network models to costly storage and compute (e.g., GPUs). How can cloud-enabled mechanisms efficiently bring about low-cost but highly-functional robots today?
In this project, our goal is to develop an efficient distributed computing platform between a robot and the cloud. We will develop an adaptive robot-cloud task management system that can intelligently off-load real-time computation to the cloud while enabling highly affordable and efficient on-board operation. We will also work to integrate various cloud-enabled functionalities with existing open-source tools for robotics development.
Project Resources and Repositories
Presentations
- Accessibility as Scalability, Eshed Ohn-Bar, IBM Tokyo (virtual), 2024
- Machine Teaching, Eshed Ohn-Bar, CISE Graduate Student Workshop, 2024
- Can We Control Time? Software-Shaped Platforms to Control Timeliness, Renato Mancuso, 2nd Research Centre in Real-Time and Embedded Computing Systems, Porto, Portugal 2023
- Can We Control Time? Software-Shaped Platforms to Control Timeliness, Renato Mancuso, 2nd Real-time and Intelligent Edge Computing Workshop (RAGE’23), San Antonio, TX 2023
- On the Limits of Imitation, Eshed Ohn-Bar, UIUC Vision Seminar (virtual), University of Illinois Urbana-Champaign 2023
- Minimal Mobile Systems, Eshed Ohn-Bar, Red Hat North America Research Interest Group (virtual), 2023
- Interactive Autonomy at Scale, Eshed Ohn-Bar, Robotics on Tap at BU 2023
Posters
- XVO: Generalized Visual Odometry via Cross-Modal Self-Training. International Conference on Computer Vision, Paris, France, 2023.
- XVO: Generalized Visual Odometry via Cross-Modal Self-Training. Workshop on Uncertainty Quantification for Computer Vision, Paris, France, 2023
Organized Events
- We have organized a workshop at CVPR 2023 on Accessibility, Vision and Autonomy
Students Involved (All Boston University except where noted)
- PhD students: Lei Lai and Zhongkai Shangguan
- Graduate Students: Kathakoli Sengupta, Sandesh Bharadwaj, Pranay Narne
- Undergraduate: Christian So, Fadi Kidess
- Outside BU: Masaki Kuribayashi (Japan)
Contributions to Diversity, Equity, and Inclusion
Our project tackles fundamental challenges in deploying real-time systems that are more efficient and less costly – such as a smartphone-based assistive system for individuals with disabilities. An undergraduate UROP student this semester is working with us on this use-case. A visiting PhD student in our lab from Japan/IBM has been developing a robot suitcase: https://assistivetechnologyblog.com/2023/03/ai-suitcase.html which provides another testbed for our testing.
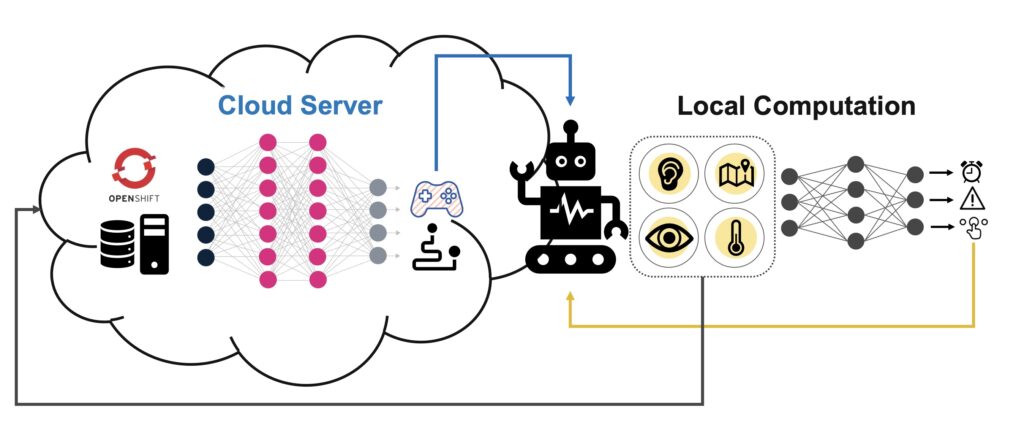
Figure caption: Cloud-based off-loading mechanisms can enable extremely low-cost robots to perform complex high-capacity tasks.
